Rethink Robotics who created the
BAXTER COLLABORATIVE ROBOT have just announced a powerful new version of the
SAWYER SDK especially for
EDUCATION & RESEARCH.
In the coming releases, you can expect to find the following, and more:
Gazebo Simulator – Allows you to simulate controlling Sawyer in a virtual environment before running the actual robot. Imagine a classroom full of 25 students developing robotics applications. With Gazebo, they can all write their code, run it through the simulator, and then, without changing application code, test it on Sawyer. This allows more people to work offline, while reducing the load on the real robot. It’s great for Researchers and Students who want to write and test application in a virtual environment.
New Motion Interface – This mode allows the user to specify high-level (Joint or Cartesian space) waypoints. Sawyer’s own onboard motion controller will then generate smooth trajectories that will interpolate motion between these waypoints. This development lowers the barriers for motion planning for programmers without a full robotics background.
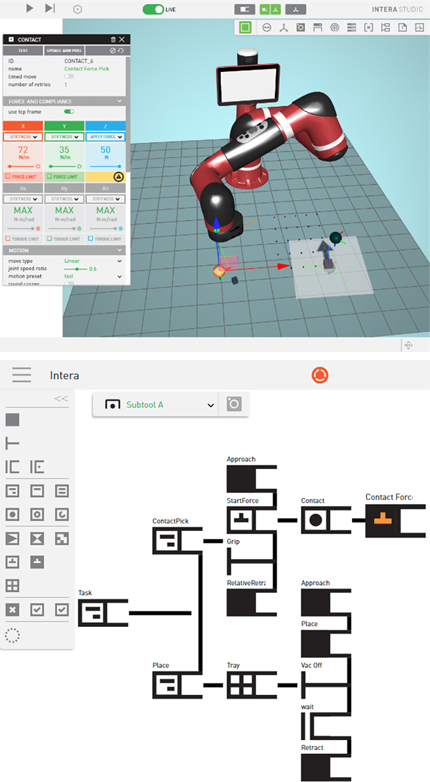
Impedance and Force control mode interfaces – Users can more quickly take advantage of our built-in torque sensors on each joint – a unique differentiator -- to use force and impedance control with the robot. Impedance control allows you to directly control the Cartesian stiffness of the endpoint. Force control enables the robot to exert forces and moments in the six Cartesian dimensions.
ASK ABOUT OUR SPECIAL EDUCATION PRICING FOR SAWYER
Click here for the Sawyer Education & Research Datasheet.